Certain retinal surgery procedures, such as the installation of stem cells, require high precision that can only be delivered by a multi-DOF micro grasping robot inside the eye allowing the surgeon to control submillimetre manipulations.
Dr Patrice Lambert
02 October 2020
Researcher wins best application paper award for innovative haptic device
A 7 degrees of freedom haptic device could lead to experiencing surgical procedures in ways that were previously impossible
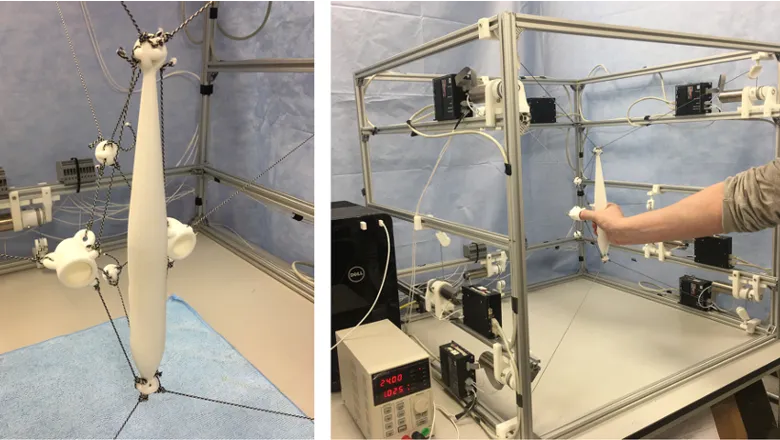
Researcher Dr Patrice Lambert from the School of Biomedical Engineering & Imaging Sciences was commended for a conference paper which demonstrates the development of an innovative lightweight haptic device allowing 7 degrees of freedom (DOF) manipulation via cable driven robotic architecture. This is thought by the research team to be the first of its kind.
Haptic devices are mechanical devices which create the experience of touch by applying motion and force feedback to an operator. They are increasingly used in teleoperation of robot-assisted surgical instruments and medical training.
Clinicians can use haptic devices to control the movement of a distant or virtual robot and feel the forces generated by the interaction of this robot with the environment.
In addition to current 6-DOF of movement manipulation, which allows positional and rotational variations around 6 perpendicular axes, the research team added a 1-DOF grasping mechanism made of a network of passive cables kept in tension enabling a pinch motion, operated with the palm of the hand and thumb and index finger, without using a mounted motor.
By keeping inertia to a minimum during precision movements, this approach eliminates the need for an electrical connection to the grasping device, reducing cost and assembly time for such devices.
7-DOF haptic devices, through their enhanced grasping capabilities and range of force feedback, could lead to patients having access to new medical procedures that cannot be done by hand currently and in targeted applications, such as vitreoretinal (eye) surgery.
Dr Lambert said incorporating a 1-DOF grasping mechanism into a haptic device allows the operator to feel the shape and stiffness of manipulated objects, for example, in the use of tools such as scissor, tweezers, and forceps in keyhole surgery.
“With this device, haptic grasping and manipulation are combined into a lightweight architecture where all motors are located on the base frame, offering advantageous mechanical properties for haptics,” he said.
The researchers validated the haptic device kinematics and control models by using an external electromagnetic tracker to compare the position, orientation, and grasping configurations computed from the motor.
“Eventually, clinicians will have access to a lightweight 7- degrees of freedom haptic system for either virtual medical training or remote control in robot-assisted surgery,” Dr Lambert said.
Dr Lambert said future experiments will include the connection of the haptic device with a virtual medical training environment and evaluation by end-users, allowing for greater precision and exploration of new application of the technology for surgical use.
The research team has filled an international patent application for the technology and is exploring commercialisation opportunities.