
Professor Christos Bergeles
Professor of Surgical Robotics
Biography
Prof Christos Bergeles received his Ph.D. degree in Robotics from ETH Zurich, Switzerland, in 2011. He was a postdoctoral research fellow at Boston Children’s Hospital, Harvard Medical School, Massachusetts, and the Hamlyn Centre for Robotic Surgery, Imperial College, United Kingdom. As a Professor at King’s College London, he directs the “Robotics and Vision in Medicine Lab” whose mission is to develop micro-surgical robots that deliver regenerative therapies deep inside the human body. Prof Bergeles has been awarded an ERC Starting Grant (2017 – 2023) and, among others, holds i4i NIHR funding (2017 – 2020, 2022 – 2025) for the development of instrumentation that delivers stem cells to diseased retinal layers. His active grant funding as PI is £2.5M. He has co-authored more than 100 articles in top-tier conferences and journals, and his research has been cited more than 3000 times. He was an Associate Editor of the IEEE Transactions on Robotics, and the IEEE Int. Conf. Robotics and Automation. His team and he are very active in public engagement and patient involvement activities, with examples including New Scientist Live (2019, 2023, 10,000+ participants), and Royal Society Summer Science Exhibition (2023, 10,000+ participants). He is an IEEE Senior Member.
Research Interests
Image-Guided Surgical Robotics
News
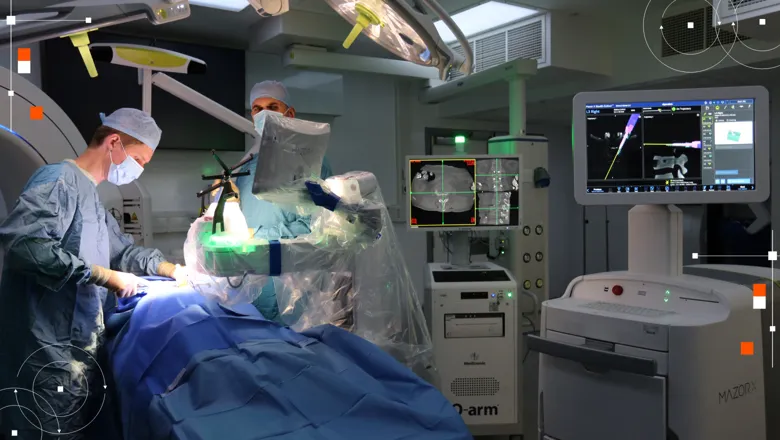
King's delivers first of its kind training with Medtronic spinal robot
The School of Biomedical Engineering & Imaging Sciences, King’s College London has delivered first of its kind human tissue dissection training using new...
New software developed to support surgical robotics
Researchers from the School of Biomedical Engineering & Imaging Sciences have successfully integrated KUKA's Fast Robot Interface (FRI) with ROS 2 and Python,...

Professors Brian Cox and Christos Bergeles on surgical robotics
Prof Christos Bergeles discusses surgical robotics for eye surgery with Prof Brian Cox as part of a video series on new and emerging STEM technologies for the...

NHS data enables AI model for optimising diabetic eye screening
A novel artificial intelligence (AI) tool, developed using NHS eye imaging datasets, could transform the efficiency of screening for Diabetic Retinopathy (DR)...

Micro-robots meet the public at the British Science Festival 2024
The School of Biomedical Engineering & Imaging Sciences showcases how micro-robotics can be used for eye surgery and the delivery of regenerative therapies at...

New EPSRC funded Surgical & Interventional Engineering Centre for Doctoral Training announced
The Engineering and Physical Sciences Research Council (EPSRC) has announced £8m funding for a new Centre for Doctoral training (CDT) at the School of...

School showcases surgical micro-robots for National Engineering Day
Professor Christos Bergeles and his team from the School of Biomedical Engineering & Imaging Sciences presented their Revitalize project for a National...

Global metric developed for the design of dextrous robots
A collaborative project by researchers from Kings College London (KCL), University College London (UCL) and Moorfields Eye Hospital has defined the design and...

Micro-robots meet the public at the Royal Society's Summer Science Exhibition 2023
The School of Biomedical Engineering & Imaging Sciences showcases how micro-robotics can be used for eye surgery and the delivery of regenerative therapies.

Summer Science Exhibition 2023: Micro-robotics for eye surgery
The School of Biomedical Engineering & Imaging Sciences has been invited to exhibit as part of this year's prestigious Royal Society Summer Science Exhibition.

Events
King's Experts Series: AI, Quantum and Microtechnologies in Healthcare
For over a decade, King’s engineering researchers have been working side-by-side with healthcare professionals to develop patient-centred innovations.
Please note: this event has passed.

Inaugural Lecture: Professor Abdel Douiri
Inspiring talks from our new professor on using predictive methods in recovery after strokes
Please note: this event has passed.
Inaugural Lecture: Professor Christos Bergeles
Inspiring talks from our new professor on re-engineering human sight
Please note: this event has passed.
Features
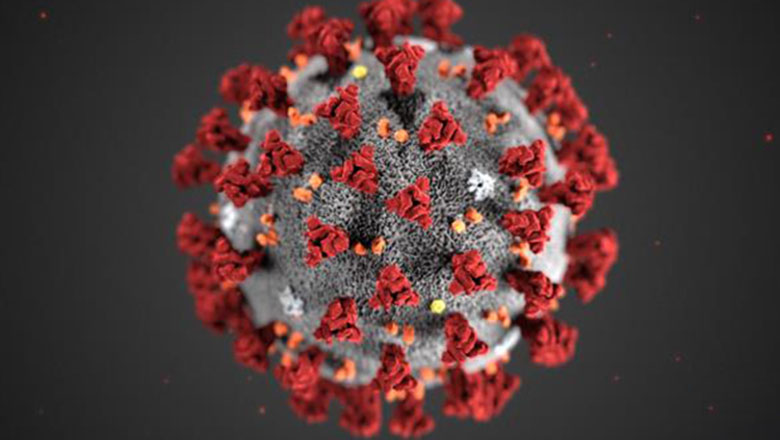
King's contributes to pandemic response
Staff and students from across the King’s community are supporting efforts to combat the novel coronavirus (Covid-19) outbreak.
News
King's delivers first of its kind training with Medtronic spinal robot
The School of Biomedical Engineering & Imaging Sciences, King’s College London has delivered first of its kind human tissue dissection training using new...
New software developed to support surgical robotics
Researchers from the School of Biomedical Engineering & Imaging Sciences have successfully integrated KUKA's Fast Robot Interface (FRI) with ROS 2 and Python,...
Professors Brian Cox and Christos Bergeles on surgical robotics
Prof Christos Bergeles discusses surgical robotics for eye surgery with Prof Brian Cox as part of a video series on new and emerging STEM technologies for the...
NHS data enables AI model for optimising diabetic eye screening
A novel artificial intelligence (AI) tool, developed using NHS eye imaging datasets, could transform the efficiency of screening for Diabetic Retinopathy (DR)...
Micro-robots meet the public at the British Science Festival 2024
The School of Biomedical Engineering & Imaging Sciences showcases how micro-robotics can be used for eye surgery and the delivery of regenerative therapies at...
New EPSRC funded Surgical & Interventional Engineering Centre for Doctoral Training announced
The Engineering and Physical Sciences Research Council (EPSRC) has announced £8m funding for a new Centre for Doctoral training (CDT) at the School of...
School showcases surgical micro-robots for National Engineering Day
Professor Christos Bergeles and his team from the School of Biomedical Engineering & Imaging Sciences presented their Revitalize project for a National...
Global metric developed for the design of dextrous robots
A collaborative project by researchers from Kings College London (KCL), University College London (UCL) and Moorfields Eye Hospital has defined the design and...
Micro-robots meet the public at the Royal Society's Summer Science Exhibition 2023
The School of Biomedical Engineering & Imaging Sciences showcases how micro-robotics can be used for eye surgery and the delivery of regenerative therapies.
Summer Science Exhibition 2023: Micro-robotics for eye surgery
The School of Biomedical Engineering & Imaging Sciences has been invited to exhibit as part of this year's prestigious Royal Society Summer Science Exhibition.
Events
King's Experts Series: AI, Quantum and Microtechnologies in Healthcare
For over a decade, King’s engineering researchers have been working side-by-side with healthcare professionals to develop patient-centred innovations.
Please note: this event has passed.
Inaugural Lecture: Professor Abdel Douiri
Inspiring talks from our new professor on using predictive methods in recovery after strokes
Please note: this event has passed.
Inaugural Lecture: Professor Christos Bergeles
Inspiring talks from our new professor on re-engineering human sight
Please note: this event has passed.
Features
King's contributes to pandemic response
Staff and students from across the King’s community are supporting efforts to combat the novel coronavirus (Covid-19) outbreak.